BASt: Forschungsprojekt „aFAS“
Entwicklungsstand eines fahrerlos automatisiert fahrenden Absicherungsfahrzeugs für Autobahnen

Das Forschungsprojekt „aFAS“ demonstriert auf seiner Halbzeitpräsentation den Entwicklungsstand eines automatisierten und fahrerlos fahrenden Absicherungsfahrzeugs für Autobahnen.
Das geladene Fachpublikum, bestehend aus Vertretern von Industrie, Straßeninfrastrukturbetreibern sowie Forschung und Lehre, erfährt nach den ersten beiden Projektjahren mehr zu den Besonderheiten und den Herausforderungen des Projekts. Auf dem Testgelände der BASt wird der Öffentlichkeit der aktuelle Entwicklungsstand des Prototyps vorgestellt.
Bewegliche Baustellen an Autobahnen stellen für das Baustellenpersonal ein hohes Risiko dar, denn es kommt immer wieder zu schwerwiegenden Auffahrunfällen auf das Fahrzeug, das im Zulauf auf die Baustelle als Absicherung eingesetzt wird.
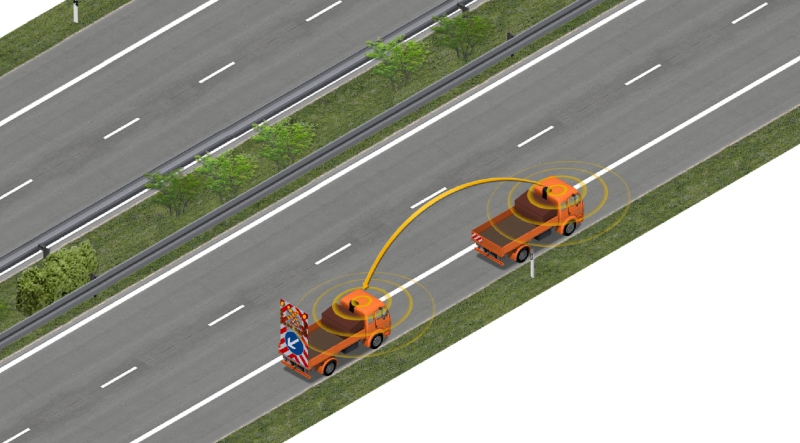
Vor diesem Hintergrund entwickelt ein Zusammenschluss von acht Partnern aus Industrie, Forschung und Verwaltung im Rahmen des Projekts „aFAS“ den Prototyp eines Absicherungsfahrzeugs, welches automatisiert mobilen Baustellen (Wanderbaustellen) auf dem Seitenstreifen einer Autobahn folgt und gegen den fließenden Verkehr absichert.
Automatisierung eines Lkws mit Absperrtafel
Ziel des vom Bundesministerium für Wirtschaft und Energie (BMWi) geförderten und über vier Jahre laufenden Projekts ist der erstmalige Einsatz eines fahrerlos automatisiert fahrenden Fahrzeugs im öffentlichen Straßenverkehr.
Im Fokus des Projekts „aFAS“ steht daher die Automatisierung eines Lkws mit Absperrtafel, der fahrerlos betrieben werden kann. Da kein Mitarbeiter an Bord sein muss, wird die Sicherheit für das Baustellenpersonal erhöht. Der Prototyp soll in Hessen auf dem Seitenstreifen von Autobahnen getestet werden.
Das Vorhaben stellt die Projektpartner aufgrund des fahrerlosen Betriebs vor große Herausforderungen: So sind besonders hohe Anforderungen an die funktionale Sicherheit des Fahrzeugs sowie an die Qualität der Fahrzeugtechnik zu erfüllen. Lenk- und Bremssystem, Sensorik, Umfeldwahrnehmung sowie steuernde Softwarekomponenten müssen strenge Kriterien für sicherheitsrelevante Systeme in Kraftfahrzeugen erfüllen.
Für die Entwicklung des Fahrzeugs ist die weitgehende Verwendung von Serienkomponenten, sowohl für die reguläre Steuerung als auch für die Umsetzung funktionaler Sicherheitsaspekte vorgesehen. Die Umgebung wird mithilfe von seriennahen Kamera- und Radarsystemen erfasst, zu denen u.a. eine Objekt-, Fahrstreifen- und Freiflächenerkennung gehören. Flankiert wird die Sensorik durch die Übertragung relevanter Informationen zwischen Arbeitsfahrzeug und Absicherungsfahrzeug über eine drahtlose Verbindung.
In die Entwicklung fließen unmittelbar Know-how und Erfahrungen aus dem Straßenbetriebsdienst ein. Der Straßenbetriebsdienst als geschlossener Anwenderkreis sowie die in niedriger Geschwindigkeit durchgeführten Einsätze auf dem Seitenstreifen stellen ideale Bedingungen für die Erprobung eines fahrerlos automatisiert fahrenden Fahrzeugs dar. Spezielle Untersuchungen zum Verkehrsablauf sowie eine umfangreiche rechtliche Bewertung ergänzen das Vorhaben.
„aFAS“ wird wichtige Erkenntnisse für mehr Sicherheit an beweglichen Baustellen und für die Weiterentwicklung vollautomatisierter und fahrerloser Fahrzeuge im öffentlichen Straßenverkehr liefern.
Es beteiligen sich folgende Unternehmen und Institutionen:
BASt – Bundesanstalt für Straßenwesen, Hessen Mobil – Straßen- und Verkehrsmanagement, Hochschule Karlsruhe – Technik und Wirtschaft, MAN Truck & Bus AG, Technische Universität Braunschweig – Institut für Regelungstechnik, ZF TRW, WABCO sowie Robert Bosch Automotive Steering GmbH.
Das Projekt startete im August 2014; die Projektlaufzeit beträgt 4 Jahre.
www.bast.de




